马上注册,享用更多功能,让你轻松玩转社区。
您需要 登录 才可以下载或查看,没有账号?立即注册 
×
1、用bluelab打开sink工程
2、修改main.c文件
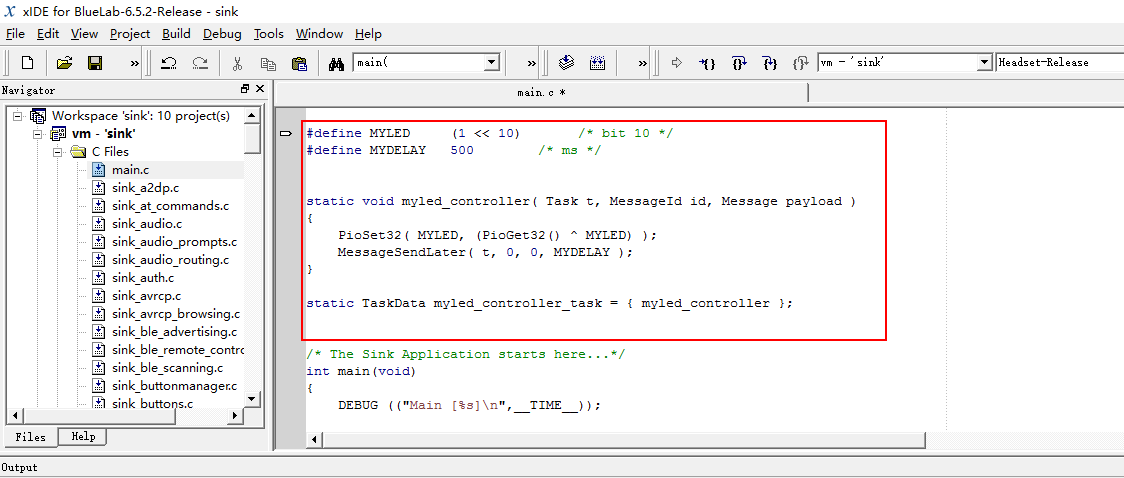
在main()函数前增加
#define MYLED (1 << 10) /* bit 10 */
#define MYDELAY 500 /* ms */
static void myled_controller( Task t, MessageId id, Message payload )
{
PioSet32( MYLED, (PioGet32() ^ MYLED) );//PIO10电平反转
MessageSendLater( t, 0, 0, MYDELAY ); //设置延时
}
static TaskData myled_controller_task = { myled_controller };
设置PIO10闪烁
在main()函数中增加:
PioSetDir32(MYLED, MYLED); //设置PIO10为输出
PioSet32(MYLED, MYLED); //初始化PIO10为高电平
MessageSend( &myled_controller_task, 0 , 0 );
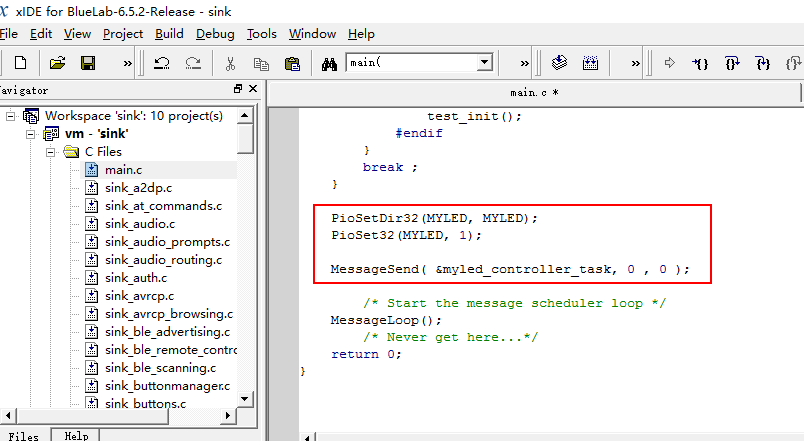
重新编译、运行程序,PIO10连接的指示灯会闪烁 将上面的PIO10改成PIO14,延时改为1ms,就可以驱动蜂鸣器发出500Hz的声音 改成PIO15,可以驱动振动器动作 注意,当PIO被系统配置占用的时候,如果用PioSet32设置PIO的数值,会导致设置语句执行失败,比如PIO6被系统占用:
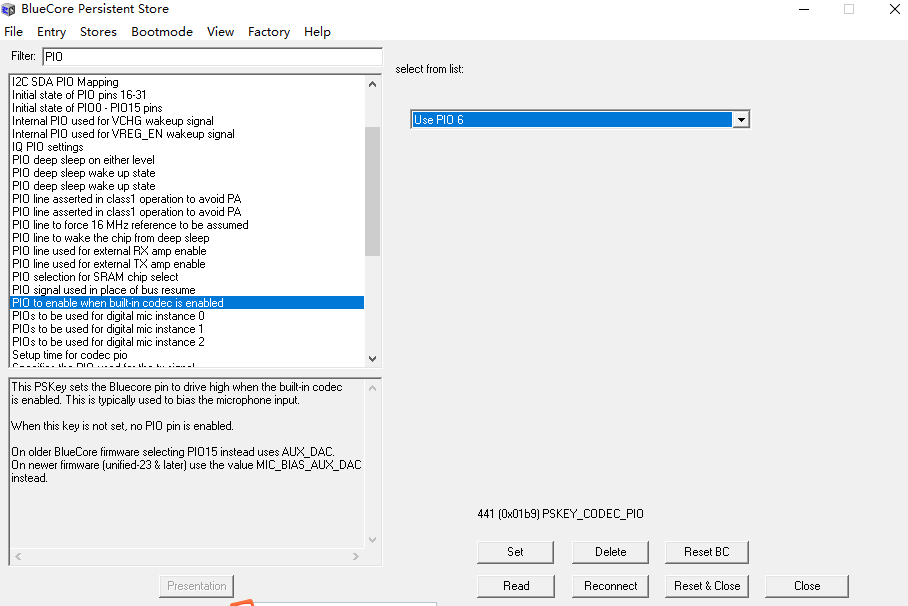
此时用语句:
PioSet32( (1<<11)|(1<<10)|(1<<7)|(1<<6)|(1<<5), itemp); 会导致整条语句执行失败
| 
 发表于 2017-7-20 10:53:32
发表于 2017-7-20 10:53:32
 提升卡
提升卡 置顶卡
置顶卡 变色卡
变色卡 发表于 2017-7-20 11:20:53
发表于 2017-7-20 11:20:53
